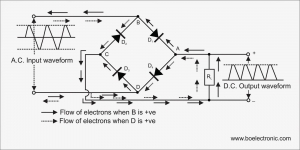
Working principle of Bridge Rectifier
Traditionally, wireless controlled robots make use of RF (radio frequency) circuits, which have its own disadvantages of restricted operational range, limited frequency range and limited control. This project introduces the use of mobile phone for robotic control. This technology is more controller friendly as it doesn’t interfere with other controllers and can use up to twelve controls. It also has the advantages of robust control and provides working range as large as the coverage area of the service provider. Although the look and capabilities of these robots vary, but they share mechanically movable structures under some form of control. The robots are controlled in three phases namely reception, processing and action. Here preceptors are sensors mounted on the robot and the processing is done by on-board micro-controller or processor. This robot works either with the help of motors or with some other actuators.

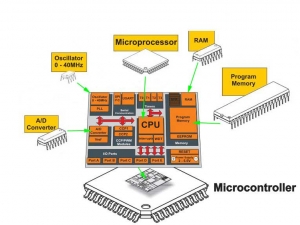
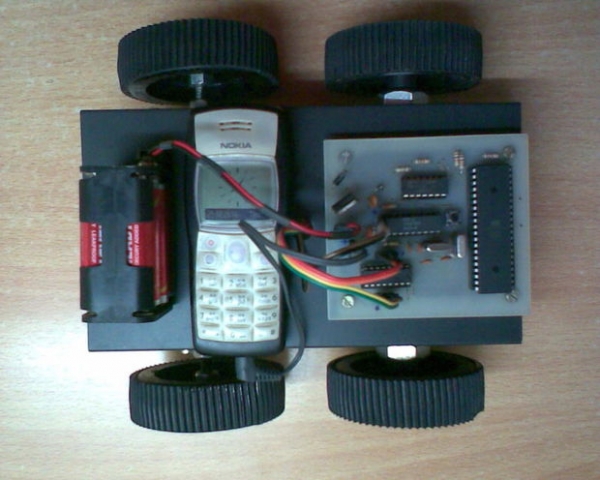
The robot is controlled by making a call on the mobile phone attached with the robot. In the course of the call if any button is pressed a ‘dual-tone multiple-frequency’ (DTMF) tone is heard at the other end of the call. The cell phone mounted on the robot perceives this tone and then the robot processes it by the ATmega16 micro-controller with the help of DTMF decoder MT8870.

Related Post